






You are here:
CAN 2.0 Controller with DMA
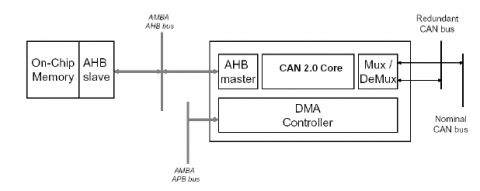
The GRCAN core is a CAN controller with an AHB DMA backend. The APB bus is used for configuration, control and status handling and the AHB bus is used for retrieving and storing CAN messages in memory external to the CAN controller. GRCAN supports transmission and reception of sets of messages by use of circular buffers located in memory external to the core. Separate transmit and receive buffers are assumed. Reception and transmission of sets of messages can be ongoing simultaneously.
View CAN 2.0 Controller with DMA full description to...
- see the entire CAN 2.0 Controller with DMA datasheet
- get in contact with CAN 2.0 Controller with DMA Supplier
Block Diagram of the CAN 2.0 Controller with DMA IP Core

CAN 2.0 Controller with DMA IP
- PCIe 2.1 Controller supporting Root Port, Endpoint, Dual-mode Configurations, with Built-in DMA and Configurable AMBA AXI Interconnect
- Universal NVM Express Controller (UNEX)
- Compute Express Link (CXL) 2.0 Controller with AMBA AXI interface
- CXL 2.0 Dual Mode Controller
- Direct Memory Access Controller IP Core
- USB 2.0 Digital Controller IP