
Modern embedded systems are expected to operate with predictable timing, continuous reliability, and near-instantaneous response under increasingly complex workloads. From automotive control units and industrial automation platforms to networking equipment and edge AI devices, modern embedded platforms execute concurrent workloads across processors, accelerators, communication interfaces, and sensor subsystems while maintaining deterministic timing requirements. Under these conditions, system performance is no longer determined solely by processor capability or firmware efficiency. The stability of an embedded system depends heavily on how hardware resources and firmware development behave together under strict timing constraints.
In many real-world deployments, system failures do not originate from defective hardware or incorrect application logic. They emerge when hardware timing behaviour, interrupt handling, memory access, peripheral coordination, and firmware scheduling lose synchronization during runtime operation. Hardware-firmware integration has therefore become a fundamental part of embedded system design. It is not simply a software layer controlling hardware peripherals. It is a coordinated engineering process that ensures deterministic behaviour across the entire platform under real-time operating conditions.
Understanding real-time constraints
Real-time constraints define the timing boundaries within which an embedded system must respond to events, process data, or complete critical operations. Unlike general-purpose computing systems, embedded platforms often operate in environments where delayed execution can directly affect system functionality, operational safety, or communication reliability.
These constraints are commonly influenced by interrupt response latency, peripheral communication timing, such as CAN controllers, Ethernet MACs, SPI interfaces, memory access conflict, sensor synchronization requirements, DMA transfer coordination, task scheduling delays, shared bus access delays, and power state transition timing. As embedded platforms become more integrated and computationally dense, maintaining deterministic timing across these operations becomes increasingly difficult.
Crucially, a system may continue functioning under nominal workloads while still violating timing requirements during peak runtime conditions. This distinction is important because many embedded failures appear only under simultaneous peripheral activity, increased communication load, or short-duration peak processing conditions. For this reason, real-time embedded design requires both hardware architecture and firmware behavior to be engineered together rather than independently.
Why independent hardware or firmware optimization falls short?
Hardware capability alone does not ensure predictable runtime behaviour. Modern embedded processors provide higher clock frequencies, multi-core architecture, dedicated accelerators, advanced peripherals like Ethernet controllers, PCIe interfaces, and high-speed communication interfaces. While these improvements increase computational capacity, they also introduce greater timing complexity inside the platform. Multiple peripherals may compete for shared memory access, and processor caches and speculative execution mechanisms can further introduce execution variability. Interrupt requests may arrive simultaneously from communication controllers, timers, sensors, and DMA engines.
Even when hardware resources are technically sufficient, poorly coordinated runtime behaviour can still produce interrupt servicing delays, packet loss, sensor data inconsistency, buffer overruns, timing jitter, synchronization drift, and missed control deadlines. Increasing processor speed alone cannot eliminate these issues because the problem often originates from system-level coordination rather than raw processing power. Hardware design must therefore consider how firmware will interact with peripherals, timing resources, memory hierarchies, and communication pathways during runtime execution.
Firmware optimization is equally limited when the underlying hardware architecture introduces non-deterministic behaviour. Firmware is responsible for controlling hardware behaviour, scheduling tasks, managing interrupts, and coordinating communication between system components. However, firmware scheduling logic cannot fully compensate for poor interrupt prioritization, shared bus congestion, inconsistent peripheral timing, unpredictable memory latency, excessive interrupt generation, or unsynchronized hardware timers. In many embedded platforms, engineers attempt to compensate for these limitations through buffering mechanisms or scheduling modifications. While these approaches may temporarily reduce symptoms, they often increase system complexity and runtime overhead. Real-time predictability cannot be achieved solely through software abstraction. It requires direct coordination between hardware architecture decisions and firmware execution models.
Real-world example: ADAS braking latency under real-time load
Consider an automotive Advanced Driver Assistance System (ADAS) performing highway-speed obstacle detection. The system continuously processes inputs from radar modules, cameras, and IMUs, as well as communication interfaces such as CAN FD and Automotive Ethernet, while simultaneously executing perception and braking algorithms under strict timing constraints.
Under normal conditions, the system operates reliably. However, during periods of high sensor activity and increased communication traffic, braking response latency begins to fluctuate. The issue is not caused by insufficient processor capability, but by timing interactions across hardware and firmware layers.
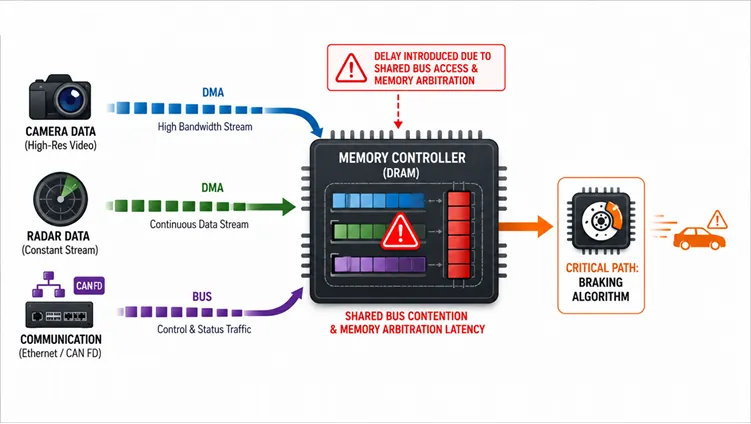
Real-time ADAS failure under siloed hardware and firmware execution
- DMA transfers compete for memory bandwidth during image processing operations
- Shared memory access produces inconsistent latency across critical tasks
- Multiple interrupts arrive simultaneously from radar sensors, communication controllers, and timer peripherals
- CAN bus traffic increases interrupt servicing frequency
- Perception tasks introduce variable processor utilization
Initial optimization efforts focused on improving processor performance and firmware scheduling. While average throughput improved, worst-case latency variation remained inconsistent due to memory arbitration delays and interrupt congestion in the system architecture.
The final redesign addressed hardware coordination and firmware execution together through priority-based interrupt routing, dedicated DMA engines, deterministic RTOS scheduling, and memory partitioning for latency-sensitive workloads. The result was a stable and predictable braking response timing under real-time operating conditions.
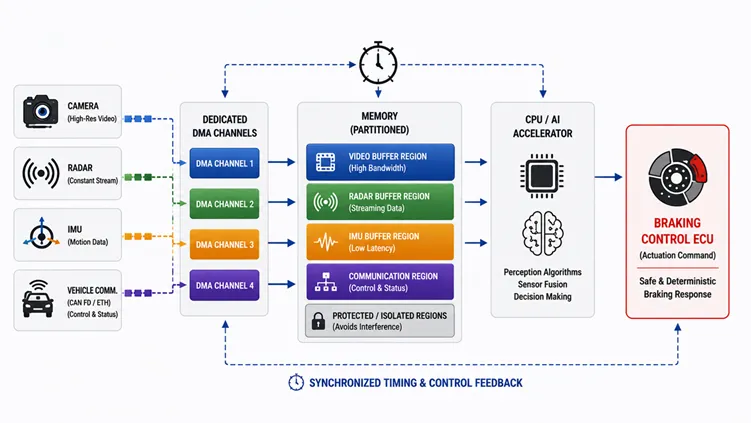
Integrated hardware firmware architecture for real-time ADAS
Core elements of hardware-firmware integration
Hardware-firmware integration refers to the coordinated interaction between embedded hardware resources and low-level firmware execution during runtime operation. In practical engineering terms, this includes several vital areas:
- Memory access management: Because DMA engines, processors, accelerators, and communication peripherals frequently compete for shared memory resources, integration design must heavily minimize contention and latency variability.
- Peripheral coordination: Firmware must interact with peripherals according to hardware timing characteristics, buffer limitations, and communication sequencing requirements.
- Interrupt architecture design: Interrupt priorities, nesting behavior, servicing latency, and ISR execution time must be engineered around real-time system requirements.
- Timing synchronization: Multiple subsystems often require synchronized timing references to maintain deterministic operation across sensors, control loops, and communication interfaces.
- Power state management: Low-power transitions must occur without violating timing requirements during wake-up events or peripheral restoration sequences.
- Edge AI and vision DSP integration: Running Small Language Models (SLMs) on Vision DSP architectures requires coordinated AI runtimes, firmware scheduling, and memory management to maintain low-power and predictable edge AI execution. Since AI inference often operates alongside sensor processing and communication workloads, maintaining deterministic runtime behavior becomes critical for reliable embedded AI platforms.
To conclude, Embedded systems design is increasingly defined by the ability to maintain predictable runtime behavior under strict real-time constraints. As system architectures continue integrating high-speed peripherals, AI workloads, advanced communication interfaces, and heterogeneous processing elements, the boundary between hardware design and firmware development becomes more tightly coupled. Real-time stability can no longer be treated as a firmware optimization problem or a hardware scaling problem independently.
Reliable embedded platforms are built through coordinated hardware-firmware integration that considers interrupt behavior, memory access timing, peripheral synchronization, communication latency, and deterministic scheduling as part of a unified runtime architecture. In modern embedded engineering, performance alone is not the primary objective, but predictability is.
At MosChip, our product engineering services focus on embedded systems design, aligning system requirements with practical implementation for hardware-firmware integration. With capabilities spanning embedded hardware and software/system design, firmware development, RTOS bring-up, bootloaders, secure drivers, HALs, AUTOSAR Classic MCAL drivers, and custom BSP development, MosChip supports platform integration across sensors, memory subsystems, and communication interfaces for MCU, SoC, and FPGA-based architectures. This enables reliable and deterministic behavior across modern platforms operating under complex runtime conditions.